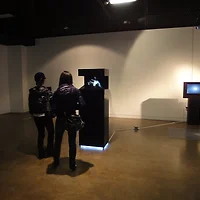
Light interactive Pheromone of Ant Robots.

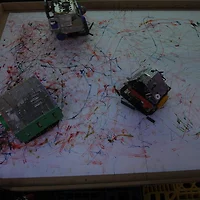
한땀한땀 전부 나의 손으로 제작된 개미를 모방한 로봇들과 붉은 빛을 뿜어내는 라이트페로몬 LED Table.
서로의 신호에 반응하면서 움직이는 로봇집단의 알고리즘과 라이트페로몬의 알고리즘이 서로 상호작용하도록 구현하였다.
움직이는 물체는 힘이있다. 미디어라는 통합적인 용어를 사용하여 표현하는 오늘날. 움직이는 미디어의 힘은 강력하다고 생각하기에 시작한 논문 작업이었다. 엄청난 개수의 라이팅 센서 모듈을 제작하고 납땜해야 했기에 잠을 잘 수 있는 시간은 하루에 고작 두어시간 뿐. 그래도 실험하고 만들면서 자식을 잉태하는 기분이랄까. 로봇들이 서로 반응하면서, 또한 로봇이 지나다니는 바닥의 라이트페로몬 테이블의 불빛에 의해서 다른 로봇이 이미지 지나간 자리의 흔적을 탐색하고 다시 거기에 반응하는 로봇들이 기특하고 귀엽기까지했다. 로봇을 만들기 전까지는 미디어로 만들어 스크린으로 보여주는 모든 작업은 공을 아무리 들여도 개나 고양이나 아끼는 인형에게 느끼는 감정 같은 것들은 없었는데 로봇은 역시나 다르다. 그래서인지 더 공들여 실험하고 로봇들이 활기차게 움직이며 돌아다닐 수 있는 환경을 만들어주겠노라 부모와 같은 마음으로 임했다.
나는 라이트페로몬이라는 아이디어가 너무나 심플하고 간결해서 스스로 마음에 든다.
개미 집단이 페로몬을 이용해서 서로의 흔적을 알아내는 생물학적인 요소가 나의 군집 로봇집단에 중요한 메타포로 적용되어 기쁘다. 로봇이 생물을 모방할 수 있을까? 라는 질문은 바보같을 수 밖에 없다. 하지만 아티스트에게 로봇이 하나의 표현요소로서 작용될 때 생물학적 특성을 모방한 로봇들의 움직임은 지극히 생물과 비교되어지는 수준의 행동을 보인다.
나는 그 사실 자체로 엄청난 의미가 있다고 생각한다. 개미 군집이나 오토마타 같은 것들이 단순한 알고리즘에 의해서 아주 복잡한 현상을 만들어내는 카오스적인 발현을 기꺼이 해낸다. 단순한 생물학적인 요소(개미에게 페로몬과 같은)가 그들의 군집에 미치는 영향은 이루 말 할 수 없다. 인터넷에 개미에 대해서 검색만 해봐도 쉽게 그 놀라움을 접할 수 있다. 그런 그들이 신기하다고 생각해보는 것 부터가 예술의 영역이라고 생각한다. 아니, 아티스트의 눈이라고 생각한다. 그냥 신기한게 아니라 그런 개미들의 커뮤니케이션 신호체계를 상상해보고 그들이 주고 받는 신호의 엄청난 결과를 본다. 그들이 주고 받는 신호는 그냥 신호가 아니였다. 조건반사적인 아날로그 신호에서 파생된 다양한 신호로 변이, 전파 되는 과정을 추측한다. 그리고나서는 내가 마치 신이 된 것 처럼 개미같은 생명체의 움직임을 따라하는 로봇들을 만들어본다. 개미가 생활하는 환경은 이미 구축된 우리가 함께 사는 환경이지만 내가 만드는 로봇이 움직이는 환경은 다르다. 많은 물리적 한계를 극복해야할 나의 사랑하는 로봇자식들에게 열악한 환경을 줄 수는 없기에 환경을 만들었다. 그 환경 속에 페로몬을 심었다. 사실, 실제 개미들도 페로몬이라는 물질을 자신들이 지나가는 영역 위에 뿌리고 지나가는 것이다. 땅이 개미를 받아들이고 페로몬이라는 물질을 받아들이는 것이라고 생각했다. 그래서 내가 나의 로봇을 위해서 만들어 주는 환경도 역시 로봇을 위해서 받아들여주는 환경이 되도록 했기에 라이프페로몬이라는 아이디어가 나올 수 있었다.
로봇들은, 기본적인 움직임이 필요하다. 어찌보면 자유의지 같은? 개미들도 맨 처음에 움직이는 개미는 자유의지에 의해서 또는 먹이의 냄새를 맡는 다거나 외부의 어떤 자극에 의해서 본인의 의지로 발걸음을 뗄 것이라 생각했다. 개미가 기본적으로 움직이는 것은 더듬이가 장애물이나 위험신호를 탐지하면서 간다고 책에서 보았다. 물론 훨씬 복잡한 생물학적 신호체계와 운동신경이 결합된 것이겠지만 군집이 움직임을 구성할 수 있도록 가상의 매개체에게 어떤 논리와 법칙을 부여해야했다. 그 법칙은 컴퓨터그래픽스의 대가 레이놀드의 flocking을 위한 boid 알고리즘에서 발견할 수 있었다. 관련 논문을 보면 군집을 이루는 각각의 개체 boid 들은 세가지 법칙을 준다고 한다.
1. 응집 2. 분리 3. 정렬.
이 세가지 법칙은 컴퓨터그래픽스로 구현된 많은 레퍼런스 코드들을 보면서 시뮬레이션 해보았고, 왜 그 개체들이 그렇게 움직이게 되었는가는 알고리즘을 보면서 어렵게어렵게 수학공식을 풀어보면서 분석되었다. 그런데.. 도대체 이것을 어떻게 가상이 아닌 실제 물리적 공간을 움직여야할 나의 로봇들에게 적용해야할 지는 잘 풀리지 않았다. 그냥 움직이면 되는 것이 아닌가 하는 생각도 들었지만 응집을 하지 않으면 떼가 되어 돌아다닐 수 가 없고, 분리가 되지 않으면 엉켜붙을테고 정렬이 되지 않으면 떼가 되어도 떼처럼 보이지 않을 것이 분명히 예상되었기 때문이었다. 결국 인고의 시간을 보내면서 고민한 결과 터치 센서와 라이트 센서를 추가하는 것으로 응집과 분리를 간단히 풀어버렸는데 정렬은 나의 로봇의 두뇌 레벨로 해낼 수 없는 task였던 것 같다.
결과물을 보면 로봇의 기계적인 구현의 미흡으로 가상의 세계에서, 그리고 나의 실험 노트 상에서 부드럽게 구현되었던 그 많은 움직임들을 나의 자식같은 로봇들이 똑같이 표현해내지는 못한다. 그것은 나의 기계적인 지식이 부족해서 이기도 하지만 금전적인 부족도 있다. 그래서 그러한 여건에서도 내가 로봇들에게 주어진 환경 안에서 잘 움직이는 로봇들이 고마웠다. 실험을 하는 동안 신체적 파손도 별 탈 없이 잘 버텨주어서 더 다행이고. 이런 저런 많은 어려움을 겪으면서 느끼는 건, 실험은 정말 중요하다는 것.
가상에서의 시뮬레이션을 시작으로 물리적 구현의 첫 단추부터 마지막 로봇의 센서영역을 감싸주는 마무리 작업을 하기까지 그것이 통채로 실험이었다는 것을 논문을 완성하고나서 더욱더 뼈져리게 느꼈다.
기회가 주어진다면, 이 로봇들을 다시 깨우고 싶다. 기회는 내가 만들어야지.
'나무가 피운 꽃 > 작업들 /project' 카테고리의 다른 글
| 구글 사이트 도구 오픈! (0) | 2010.08.12 |
|---|---|
| 2010. 인사아트센터 interface: surface (0) | 2010.02.28 |
| 2009_서울디자인페스티벌 CINE de CHEF/CJ CGV (2009,12,2~6) (0) | 2009.12.09 |
| 전기달린 드로잉 _ with 따뜻한 미디어공장(factory36.5) (0) | 2009.12.09 |
| 피카소 프로젝트 2 _2009 SPRING (Tool: Visual Studio C++, Openframeworks, OpenCV, logitech cam) (1) | 2009.10.23 |